欢迎来到天津华茂致远自动化科技有限公司网站!

 185-12233227
185-12233227



智能搬运机器人是一种新型的物流装备,它集机、电、液于一体,采用先进的计算机集成制造系统技术进行控制。这种机器人的大特点是可以自动完成货物或物料的存取和搬送任务,实现生产过程中的自动化输送作业(在化工企业中主要用于粉料和小颗粒物的装卸)。
该类产品主要结构包括机身、左右行走机构、起升机构、回转机构、储仓式变位器以及加长型臂托装置等部分组成;工作流程是首先由工控机发出指令给控制系统中的中央处理器,然后通过驱动电机转动带动着机械传动系统和承载机体运动从而实现在货场内往来的运输及堆垛存储等功能。






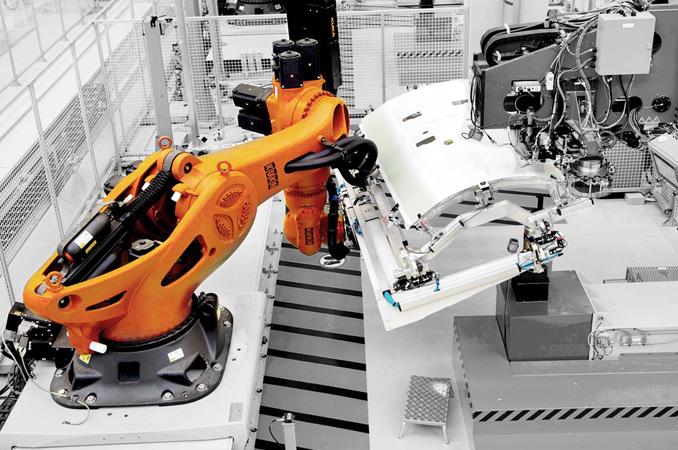
工业搬运机器人是一种用于工业生产的自动化设备,具有高精度、低成本等优点,广泛应用于汽车、电子、机械等行业。以下是工业搬运机器人原理的简要介绍:
控制系统:工业搬运机器人的控制系统是其中心部分,通过计算机软件和硬件的组合,控制机器人的运动和行为。
传感器:工业搬运机器人的传感器是其重要组成部分,通过检测物体的位置、速度、加速度等信息,控制机器人的运动和行为。
机械系统:工业搬运机器人的机械系统是其基础部分,通过机械臂、运动平台等组成,实现机器人的运动和行为。
电机:工业搬运机器人的电机是其动力来源,通过控制电机的转速和扭矩,实现机器人的运动和行为。


搬运机器人系统通常由以下几个部分组成:
机器人本体:搬运机器人的本体是机器人的部分,包括机器人的机械结构、控制系统、传感器等。机器人本体的设计和制造需要考虑机器人的负载能力、运动范围、精度等因素。
控制系统:搬运机器人的控制系统是机器人的大脑,负责控制机器人的运动、感知周围环境、识别物体等。控制系统通常由计算机、传感器、驱动器等组成。
传感器:搬运机器人的传感器是机器人的感官,负责感知周围环境,例如视觉传感器、激光传感器、接触传感器等。
支撑系统:搬运机器人的支撑系统是机器人的支撑结构,负责支撑机器人的重量和稳定性。支撑系统通常由机器人本体、支架、地面固定装置等组成。



扫一扫手机网站






 在线客服
在线客服 185-12233227
185-12233227 litao_llt@163.com
litao_llt@163.com